Autonomous Mobile Robot
 Final form of the project
Final form of the project
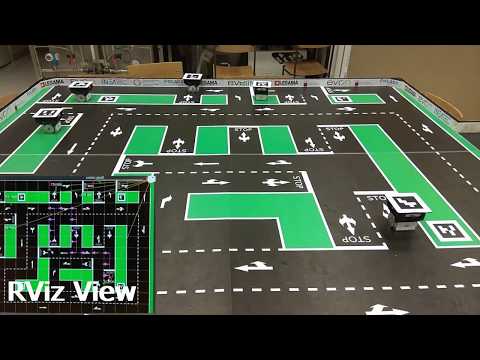
Project similar to MIT duckie town where the robot has to drive through the city in an autonomous way taking into account lanes directions and stop signs. The developed planning algorithm was A*, odometry implements Euler integration while control manages to drive the robot through the path generated by A*.
Sergio Gasquez
Embedded Software Engineer
Telecommunications Engineer with Masters in Electronic Systems for Intelligent Environments who loves firmware and embedded systems programming!